




중요 성능 특성화 매개변수레이저 시스템
1. 파장 (단위: 나노미터 ~ 마이크로미터)
그만큼레이저 파장레이저가 전달하는 전자기파의 파장을 나타냅니다. 다른 종류의 빛과 비교했을 때, 중요한 특징은 다음과 같습니다.원자 램프단색광이라는 것은 파장이 매우 순수하고 명확하게 정의된 하나의 주파수만 가지고 있다는 것을 의미합니다.
레이저의 파장별 차이점:
적색 레이저의 파장은 일반적으로 630nm~680nm 사이이며, 방출되는 빛은 붉은색입니다. 이는 가장 흔하게 사용되는 레이저이기도 합니다(주로 의료용 조명 등 분야에 사용됨).
녹색 레이저의 파장은 일반적으로 약 532nm입니다(주로 레이저 거리 측정 등의 분야에 사용됨).
청색 레이저의 파장은 일반적으로 400nm~500nm 사이입니다(주로 레이저 수술에 사용됨).
350nm~400nm 사이의 자외선 레이저(주로 생의학 분야에서 사용됨);
적외선 레이저는 파장 범위와 응용 분야에 따라 매우 특별한 특성을 지니며, 일반적으로 700nm~1mm 범위에 속합니다. 적외선 대역은 근적외선(NIR), 중적외선(MIR), 원적외선(FIR)의 세 가지 하위 대역으로 나눌 수 있습니다. 근적외선 파장 범위는 약 750nm~1400nm이며, 광섬유 통신, 생체 영상, 적외선 야간 투시 장비 등에 널리 사용됩니다.
2. 전력 및 에너지 (단위: W 또는 J)
레이저 출력이 용어는 연속파(CW) 레이저의 광 출력 또는 펄스 레이저의 평균 출력을 나타내는 데 사용됩니다. 또한, 펄스 레이저는 펄스 에너지가 평균 출력에 비례하고 펄스 반복률에 반비례한다는 특징을 가지며, 출력과 에너지가 높은 레이저일수록 일반적으로 더 많은 폐열을 발생시킵니다.
대부분의 레이저 빔은 가우시안 빔 프로파일을 가지므로, 조사 강도와 광속은 레이저의 광축에서 가장 높고 광축에서 벗어날수록 감소합니다. 반면, 평탄형 빔 프로파일을 가진 레이저도 있는데, 이는 가우시안 빔과 달리 빔 단면 전체에 걸쳐 조사 강도가 일정하고 강도가 급격히 감소하는 특징을 보입니다. 따라서 평탄형 레이저는 최대 조사 강도 지점이 없습니다. 동일한 평균 출력을 가진 가우시안 빔의 최대 출력은 평탄형 빔의 최대 출력의 두 배입니다.
3. 펄스 지속 시간 (단위: fs ~ ms)
레이저 펄스 지속 시간(즉, 펄스 폭)은 레이저가 최대 광 출력의 절반(FWHM)에 도달하는 데 걸리는 시간입니다.
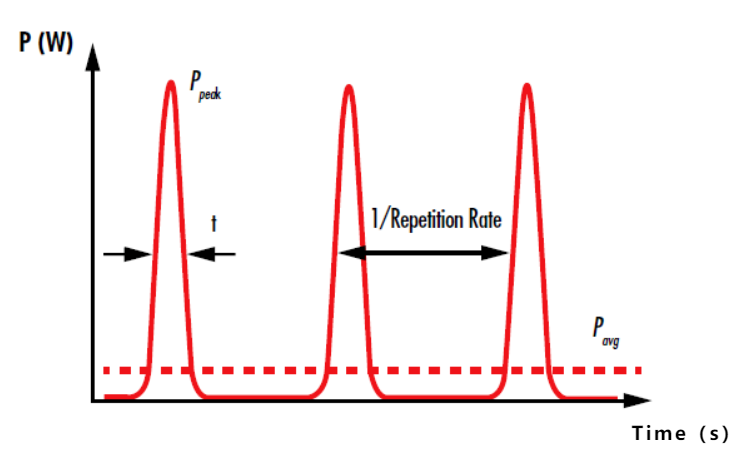
4. 반복률 (단위: Hz ~ MHz)
반복률펄스 레이저펄스 반복률(즉, 펄스 발생률)은 초당 방출되는 펄스 수를 나타내며, 이는 펄스 간격의 역수입니다. 반복률은 펄스 에너지에 반비례하고 평균 출력에 비례합니다. 반복률은 일반적으로 레이저 이득 매질에 따라 달라지지만, 많은 경우 변경할 수 있습니다. 반복률이 높을수록 레이저 광학 소자의 표면과 최종 초점의 열 완화 시간이 짧아져 재료의 가열 속도가 빨라집니다.
5. 발산 (일반적인 단위: mrad)
레이저 빔은 일반적으로 평행광으로 여겨지지만, 회절로 인해 빔의 중심에서 멀어질수록 빔이 얼마나 벌어지는지를 나타내는 발산량을 항상 포함합니다. 라이다 시스템과 같이 물체가 레이저 시스템에서 수백 미터 떨어져 있을 수 있는 장거리 작동이 요구되는 응용 분야에서는 발산량이 특히 중요한 문제가 됩니다.
6. 스팟 크기 (단위: μm)
집속된 레이저 빔의 스폿 크기는 집속 렌즈 시스템의 초점에서 빔의 직경을 나타냅니다. 재료 가공 및 의료 수술과 같은 많은 응용 분야에서 목표는 스폿 크기를 최소화하는 것입니다. 이를 통해 출력 밀도를 극대화하고 특히 정밀한 형상을 구현할 수 있습니다. 구면 수차를 줄이고 더 작은 초점 스폿 크기를 생성하기 위해 기존의 구면 렌즈 대신 비구면 렌즈가 자주 사용됩니다.
7. 작동 거리 (단위: μm ~ m)
레이저 시스템의 작동 거리는 일반적으로 최종 광학 요소(일반적으로 초점 렌즈)에서 레이저가 초점을 맞추는 물체 또는 표면까지의 물리적 거리로 정의됩니다. 의료용 레이저와 같은 특정 응용 분야에서는 작동 거리를 최소화하는 것이 목표인 반면, 원격 감지와 같은 다른 응용 분야에서는 작동 거리 범위를 최대화하는 것이 목표입니다.
게시 시간: 2024년 6월 11일